Tom Botterill's computer vision research page
Code - Publications - Videos - Personal website -I'm about to move to San Diego to start a new computer vision research job.
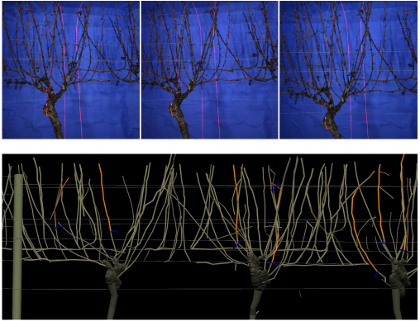
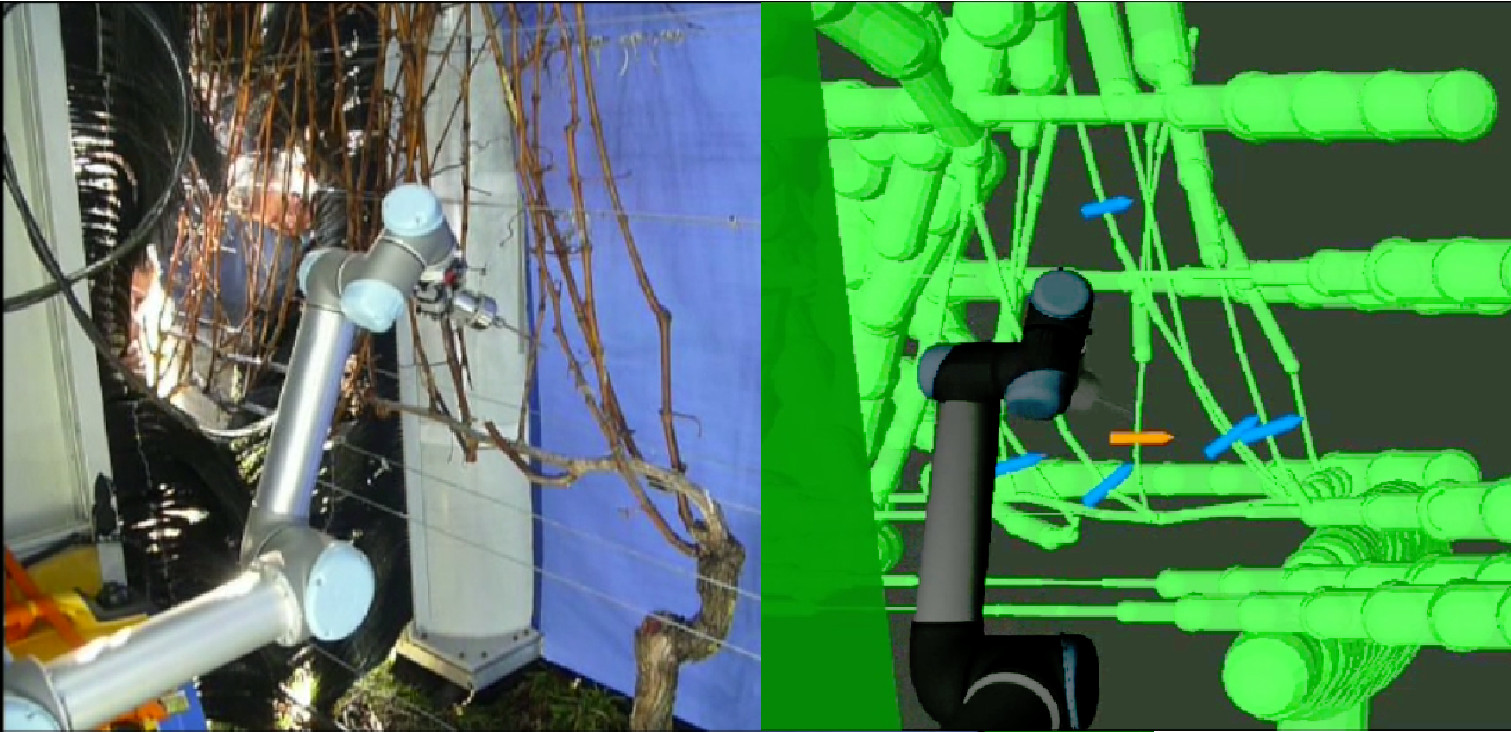
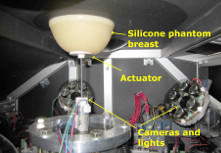
I've just finished a postdoc at the Department of Computer Science, University of Canterbury, Christchurch, New Zealand, where I worked on a project to build a computer-vision based robot that prunes vines with a robot arm (recently featured in Idealog magazine). I also work for Tiro Lifesciences on the DIET breast cancer screening project, and with the Spatial Engineering Research Centre.
Email:
C++ source code from my PhD is online here... includes BoWSLAM single camera SLAM, BaySAC, Bag-of-Words, k-medoids, Essential matrix estimation.
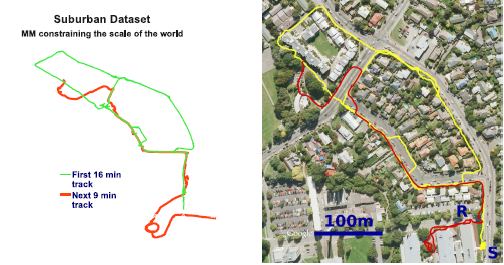
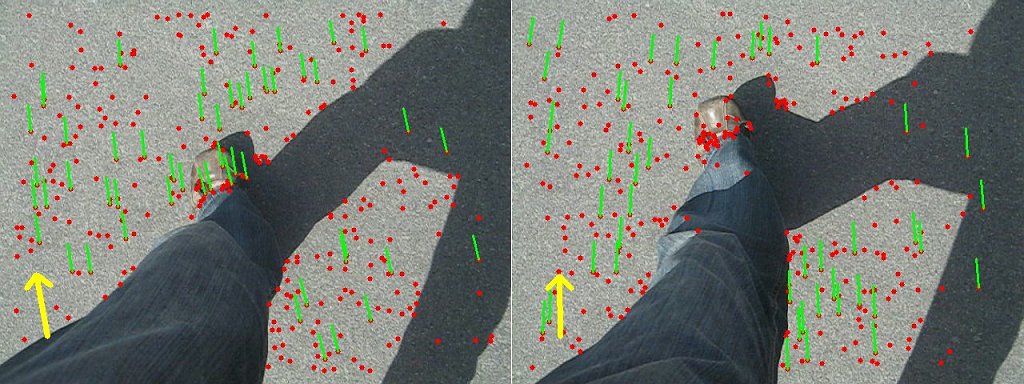
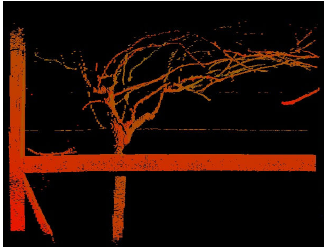
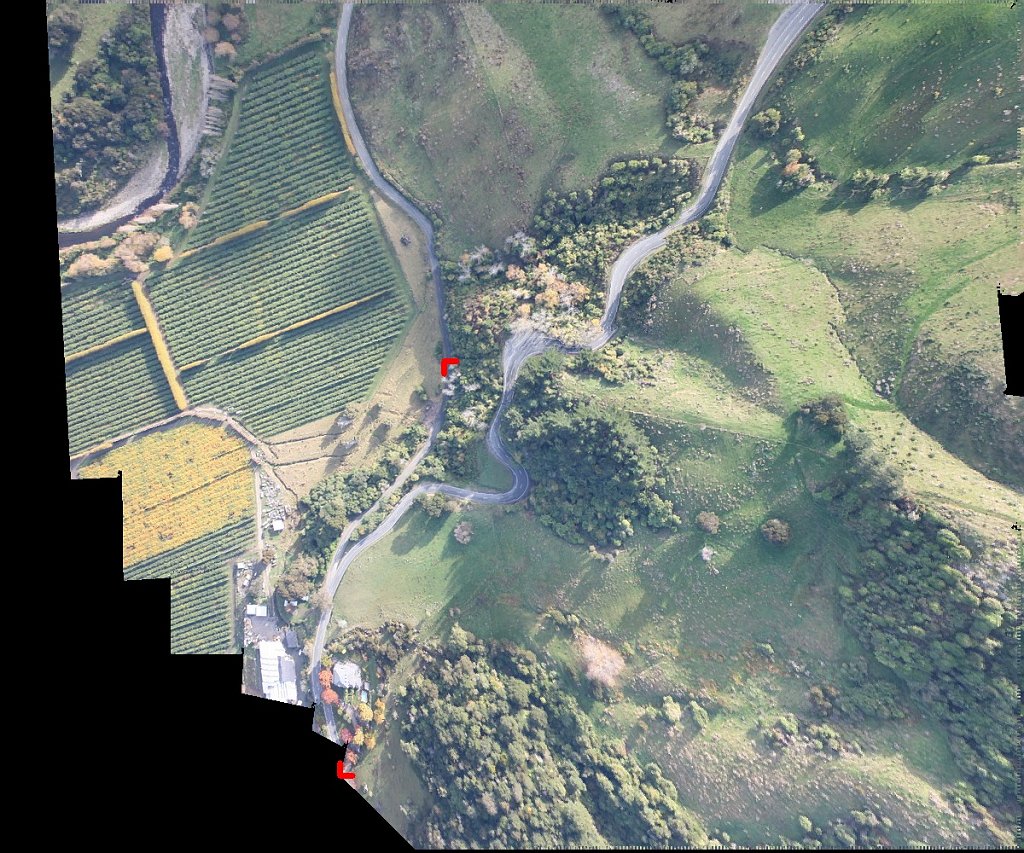
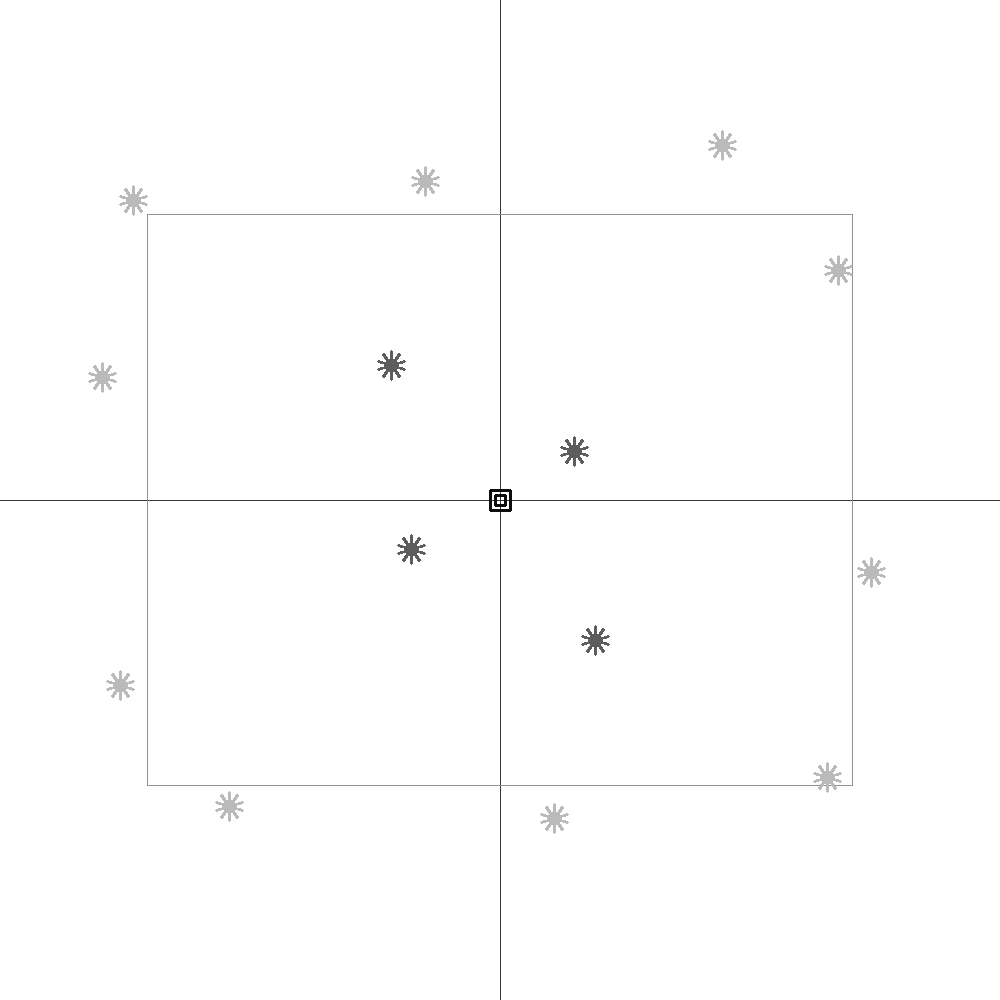
Publications: Single Camera SLAM and BoW, Robot arm motion planning, RANSAC for relative pose via the essential matrix, Computer vision for elastographic breast cancer screening, Pedestrian navigation using IMU+vision, Structured light, 3D vine reconstruction from images, Aerial Image Mosaicing
Full list from UC or Google Scholar